
الوصف





معلومات إضافية
| نموذج الروبوت | ZMD-2010A |
|---|---|
| نموذج مسار السكك الحديدية | ZMD6100A-12 |
| طول مسار السكة الحديد | 12 m |
| الحمولة | 800 كجم |
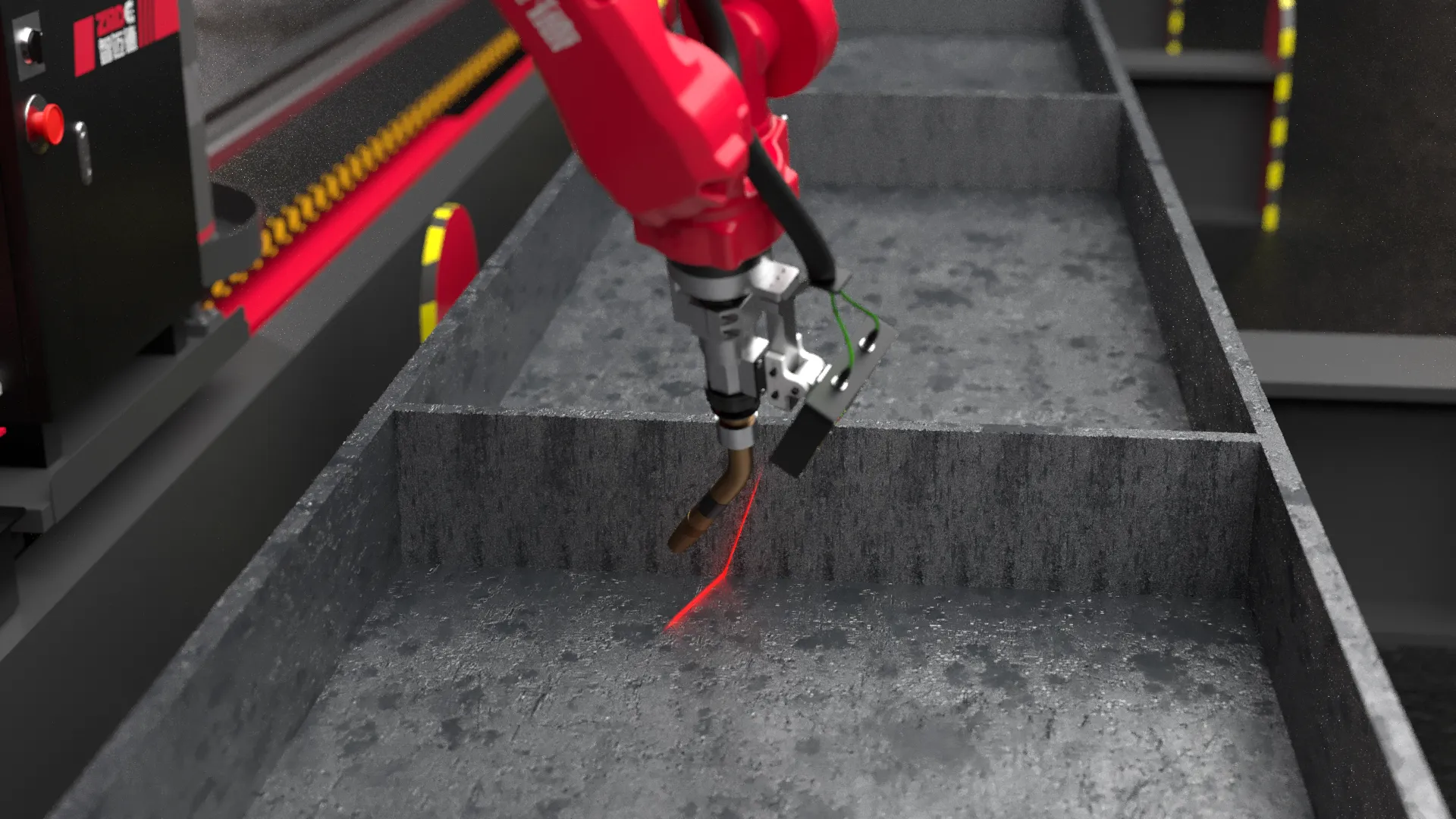
| مستشعر الرؤية بالليزر | BCW600P |
| مزود الطاقة | تيار متردد 380 فولت، 50 هرتز، 3 مراحل |






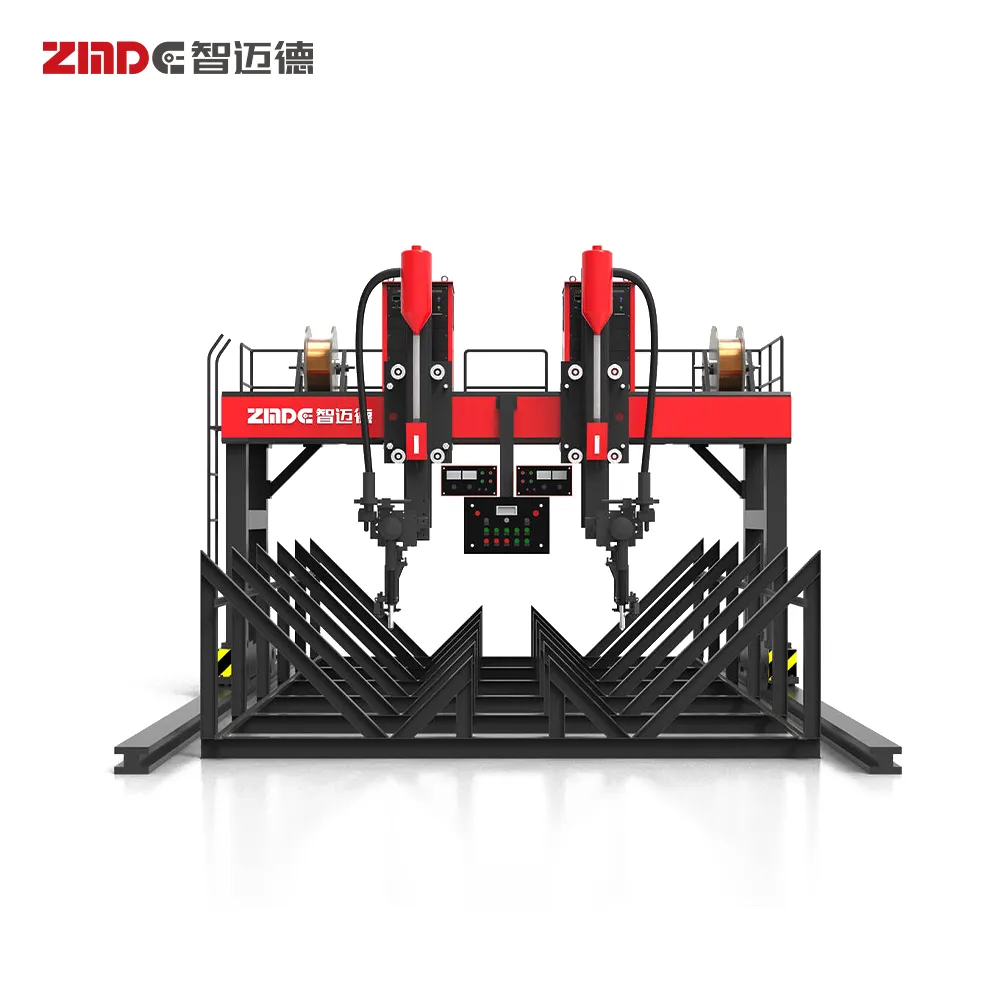
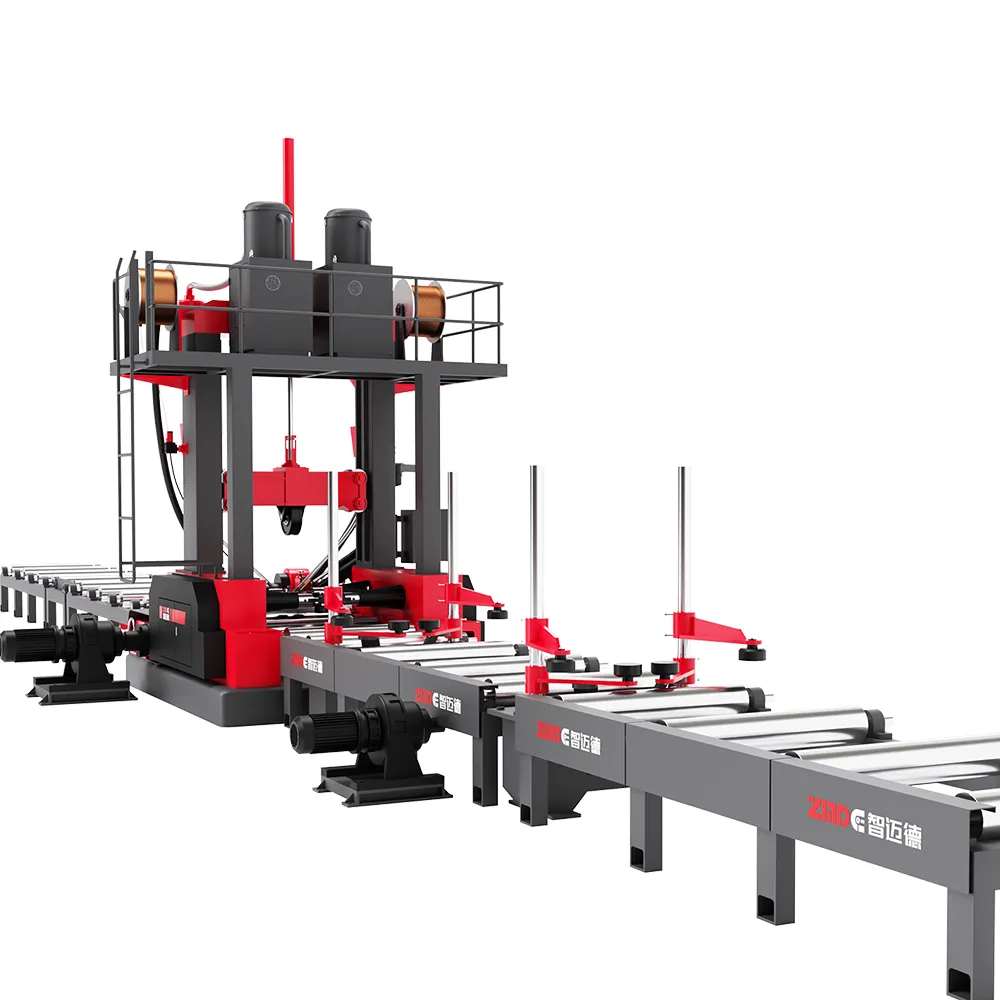
يتم استخدام روبوت اللحام القنطري من نوع اللحام القنطري باستخدام الحاسب الآلي ذو 8 محاور ZMDE PEB للهيكل الفولاذي PEB في عملية تصنيع العارضة H/I/TI.
| نموذج الروبوت | ZMD-2010A |
|---|---|
| نموذج مسار السكك الحديدية | ZMD6100A-12 |
| طول مسار السكة الحديد | 12 m |
| الحمولة | 800 كجم |
| مستشعر الرؤية بالليزر | BCW600P |
| مزود الطاقة | تيار متردد 380 فولت، 50 هرتز، 3 مراحل |